「Parts:DevBoard:ESP32-S3-DevKitC-1」の版間の差分
| 230行目: | 230行目: | ||
|- | |- | ||
| | | | ||
| − | | | + | |XTAL_32K_P |
|2-4 | |2-4 | ||
|15 | |15 | ||
| 250行目: | 250行目: | ||
|- | |- | ||
| | | | ||
| − | | | + | | XTAL_32K_N |
|2-5 | |2-5 | ||
|16 | |16 | ||
| 290行目: | 290行目: | ||
|- | |- | ||
| | | | ||
| − | | | + | | CLK_OUT3 |
|2-6 | |2-6 | ||
|18 | |18 | ||
| 542行目: | 542行目: | ||
!やるべきこと | !やるべきこと | ||
|- | |- | ||
| − | ! | + | ! |
| − | | | + | |GPIO3 |
| − | | | + | | |
| − | |'''Pull | + | | |
| + | |- | ||
| + | ! | ||
| + | |GPIO0 | ||
| + | |0:JointDownloadBoot | ||
| + | 1:SPI Boot (Default) | ||
| + | |'''Pull Up''' | ||
|- | |- | ||
| − | ! | + | ! |
| − | | | + | |GPIO46 |
| − | | | + | |0:JointDownloadBoot |
|'''Pull Down''' | |'''Pull Down''' | ||
|- | |- | ||
| − | ! | + | ! |
| − | | | + | |gpio45 |
| − | | | + | |0:Flash 3.3V |
| − | + | 1:Flash 1.8V | |
| − | |||
| − | |||
| − | |||
| − | |||
|'''Pull Up''' | |'''Pull Up''' | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
|} | |} | ||
</blockquote> | </blockquote> | ||
| 578行目: | 575行目: | ||
!特殊機能 | !特殊機能 | ||
!やるべきこと | !やるべきこと | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
|- | |- | ||
! rowspan="2" |UART0 | ! rowspan="2" |UART0 | ||
| − | ! | + | ! |
| − | ! | + | ! |
|RXD0 | |RXD0 | ||
|USB通信用 | |USB通信用 | ||
| − | | rowspan="2" | | + | | rowspan="2" |DefaultではUSBとUART0が同等に扱われる。 |
| + | 設定すればバラバラにできるかも?? | ||
|- | |- | ||
| − | ! | + | ! |
| − | ! | + | ! |
|TXD0 | |TXD0 | ||
|USB通信用 | |USB通信用 | ||
|- | |- | ||
! rowspan="6" |内部Flash | ! rowspan="6" |内部Flash | ||
| − | ! | + | ! |
| − | ! | + | ! |
|SPI-SCK/CLK | |SPI-SCK/CLK | ||
| rowspan="6" |SPI-Flash | | rowspan="6" |SPI-Flash | ||
| 607行目: | 597行目: | ||
| − | '''<small>manual p. | + | '''<small>manual p.26</small>''' |
| − | <small> | + | <small>It is not recommended to use the pins connected to flash/PSRAM for any other purposes.</small> |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
|- | |- | ||
| − | ! | + | ! |
| − | ! | + | ! |
| − | | | + | |SPI-CS0/CS# |
| − | |||
|- | |- | ||
| − | ! | + | ! |
| − | ! | + | ! |
| − | | | + | |SPID |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
|- | |- | ||
| − | ! | + | ! |
| − | ! | + | ! |
| − | | | + | |SPIQ |
| − | |||
|- | |- | ||
| − | ! | + | ! |
| − | ! | + | ! |
| − | | | + | |SPIWP |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
|- | |- | ||
| − | + | ! | |
| − | + | ! | |
| − | + | |SPIHD | |
| − | |||
|} | |} | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | </blockquote>-------------------------------------ここから下は書きかけ ------------------------------------- | |
| − | |||
| − | |||
| − | |||
| − | </blockquote> | ||
== Flashの全消去 == | == Flashの全消去 == | ||
| 834行目: | 724行目: | ||
== 使ってみた結果 == | == 使ってみた結果 == | ||
| − | * | + | *<br /> |
| − | |||
| − | |||
| − | |||
----[https://robot-jp.com/wiki/index.php 戻る] | ----[https://robot-jp.com/wiki/index.php 戻る] | ||
2023年12月3日 (日) 22:57時点における版
メーカー Espressif Systems (Shanghai) Pte. Ltd. 商社 秋月電子通商 ボード名 ESP32-S3-DevKitC-1 (ArduinoIDE設定有) CPU Espressif ESP32-S3-WROOM-1-E1N8 240MHz FLASH 4MB 80MHz ※DevKitCは40MHz&DIOで使うのがオススメ SRAM 512kB Schematic Diagram esp32-s3-wroom-1_wroom-1u_datasheet_en.pdf (Espressif p.27-29) Dimensional drawing 列間ピッチ25.4mm Document Specification:---
ESP32-S3-DevKitC Programing Guide (Espressif HP)AMS1117-3.3 (Reg drop1V)
技適Certificate ESP32-S3-WROOM-1 Telec Certification Datasheet Module CPU ESP32-S3 販売店 日本 秋月電子通商 \2300 送料\600 (ESp32-S3-WROOM32-1-N8 : SRAM512kB Flash8MB) Amazon ¥4280 送料\0
USA Digikey \2373 合計6000円以上で送料\0。合計10000円未満は消費税なし。 中国 Espressif 2022/3/11時点で、秋月では新規採用OK、Digikeyでは新規採用NG。
Pin Function
※NodeMCU-32Cとピンコンパチ ※「初期電圧」欄は全ピン未接続の時の開放電圧実測値。
※GPIOポート番号の表記は資料により GPIO**/P**/D** 等のように記載が統一されていないため、ここではP**とした。
割込 専用 機能
ADC GPIO 初期 電圧
Name PU /PD
pin 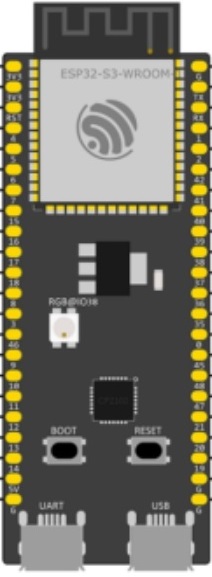
pin PU /PD
Name 初期 電圧
GPIO ADC 専用 機能
JTAG SPI I2C 割込 3V3 1 44 GND 3V3 2 43 U0TXD 43 RST 3 42 U0RXD 44 1-3 4 4 41 1 1-0 1-4 5 5 40 2 1-1 1-5 6 6 39 42 MTMS 1-6 7 7 38 41 MTDI XTAL_32K_P 2-4 15 U0RTS 8 37 40 MTDO XTAL_32K_N 2-5 16 U0CTS 9 36 39 MTCK 2-6 17 U1TXD 10 35 RGB_LED 38 CLK_OUT3 2-6 18 U1RXD 11 34 37 SPIDQS 1-7 8 12 33 36 SPIIO7 JTAG 1-2 3 13 32 35 SPIIO6 LOG 46 14 31 0 BOOT 1-8 9 15 30 45 VSPI 1-9 10 FSPIIO4 16 29 48 SPICLK_N 2-0 11 FSPIIO5 17 28 47 SPICLK_P 2-1 12 FSPIIO6 18 27 21 2-2 13 FSPIIO7 19 26 U1CTS 20 2-9 USB_D+ 2-3 14 FSPIDQS 20 25 U1RTS 19 2-8 USB_D- 5V0 21 24 GND GND 22 23 GND


注意事項
下記端子は使用方法が決まっているため特に考慮する。
起動に関する機能が決まっている端子 Pin No. 名称 特殊機能 やるべきこと GPIO3 GPIO0 0:JointDownloadBoot 1:SPI Boot (Default)
Pull Up GPIO46 0:JointDownloadBoot Pull Down gpio45 0:Flash 3.3V 1:Flash 1.8V
Pull Up
各機能で端子が決まっている端子 機能 Pin No. GPIO 名称 特殊機能 やるべきこと UART0 RXD0 USB通信用 DefaultではUSBとUART0が同等に扱われる。 設定すればバラバラにできるかも??
TXD0 USB通信用 内部Flash SPI-SCK/CLK SPI-Flash 使用禁止
manual p.26It is not recommended to use the pins connected to flash/PSRAM for any other purposes.
SPI-CS0/CS# SPID SPIQ SPIWP SPIHD
-------------------------------------ここから下は書きかけ -------------------------------------
Flashの全消去
パーテーションを変更する時はFlashを全消去します。
ubuntu
ESP-IDFをインストールして、esptool.pyが使えるようにします。
ArduinoIDE等のシリアルポートを使っているプログラムを全て終了させます。</ BR> USBポートが"/dev/ttyUSB0"の場合です。
> cd ~/git/arduino-esp32/tools/ > ./esptool.py --chip esp32 --p /dev/ttyUSB0 --baud 921600 erase_flash
起動モード
Table4: Strapping Pins
IO 0/2/5/12/13/15
内部電圧 : Voltage of Internal LDO (VDD_SDIO) Pin Default 3.3V 1.8V MTDI(GPIO12) Pull-down 0 1 起動モード : Booting Mode Pin Default 実行 : SPI Boot 書込 : Download Boot GPIO0 Pull-up 1 0 GPIO2 Pull-down Don’t-care 0 Enabling/Disabling Debugging Log Print over U0TXD During Booting Pin Default U0TXD Toggling U0TXD Silent MTDO(GPIO15) Pull-up 1 0 Enabling/Disabling Debugging Log Print over U0TXD During Booting Pin Default Falling-edge Input Falling-edge Output
Falling-edge Input Rising-edge Output
Rising-edge Input Falling-edge Output
Rising-edge Input Rising-edge Output
MTDO(GPIO15) Pull-up 0 0 1 1 GPIO5 Pull-up 0 1 0 1